
Lane-level scene annotations provide invaluable
data in autonomous vehicles for trajectory planning in complex environments such as urban areas and cities. However,
obtaining such data is time-consuming and expensive since lane
annotations have to be annotated manually by humans and are
as such hard to scale to large areas.
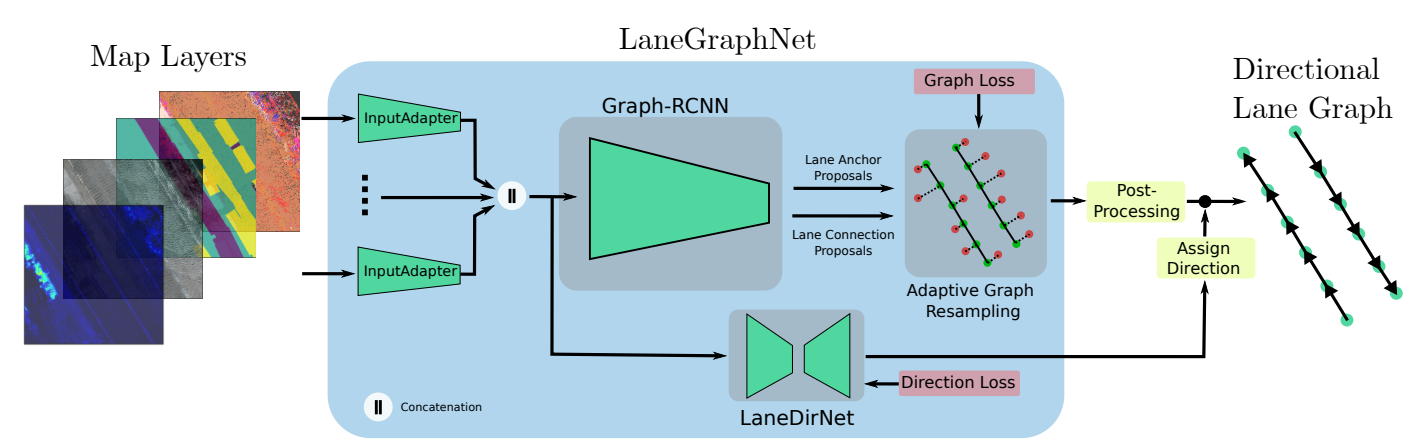
In this work, we propose a
novel approach for lane graph estimation from bird’s-eye-view images. We formulate the problem of lane shape and lane
connections estimation as a graph estimation problem where
lane anchor points are graph nodes and lane segments are graph
edges. We train a graph estimation model on bird’seye-view data processed from the popular NuScenes dataset and
its map expansion pack. We furthermore estimate the direction
of the lane connection for each lane segment with a separate
model which results in a directed lane graph.
We illustrate the
performance of our LaneGraphNet model on the challenging
NuScenes dataset and provide extensive qualitative and quantitative evaluation. Our model shows promising performance for
most evaluated urban scenes and can serve as a step towards
automated generation of HD lane annotations for autonomous
driving.